Cloud Optimized GeoTIFF Results Export with ras2cng¶
Generate result rasters (WSE, Depth, Velocity, Froude, Shear Stress, DxV) from HEC-RAS simulations, convert to Cloud Optimized GeoTIFF (COG), and optionally build raster PMTiles — all using ras2cng and its generate_result_maps() function backed by RasStoreMapHelper.exe.
USE_LOCAL_SOURCE = False
if USE_LOCAL_SOURCE:
import sys
from pathlib import Path
local_path = str(Path.cwd().parent)
if local_path not in sys.path:
sys.path.insert(0, local_path)
print(f"LOCAL SOURCE MODE: Loading from {local_path}/ras_commander")
else:
print("PIP PACKAGE MODE: Loading installed ras-commander")
from ras_commander import RasExamples, init_ras_project, RasCmdr, ras
from pathlib import Path
import numpy as np
import ras_commander
print(f"ras-commander: {ras_commander.__file__}")
import ras2cng
print(f"ras2cng: {ras2cng.__file__}")
PIP PACKAGE MODE: Loading installed ras-commander
2026-06-11 14:52:30 - numexpr.utils - INFO - NumExpr defaulting to 8 threads.
ras-commander: <repo>\ras_commander\__init__.py
ras2cng: <symphony-dev>\Lib\site-packages\ras2cng\__init__.py
Prerequisites¶
- ras-commander installed:
pip install ras-commander - ras2cng installed:
pip install ras2cng - HEC-RAS installed (Windows): RasStoreMapHelper.exe generates the rasters
- rasterio installed:
pip install rasterio(for raster inspection and display) - matplotlib installed:
pip install matplotlib(for raster visualization) - Optional: GDAL CLI for COG conversion (
gdal_translate)
What You'll Learn¶
- Generate result rasters from completed HEC-RAS simulations
- Produce WSE, Depth, Velocity, Froude, Shear Stress, and DxV raster layers
- Convert rasters to Cloud Optimized GeoTIFF (COG) format
- Inspect and display raster results in the notebook
- Understand the 11 available map types and when to use each
How It Works¶
ras2cng's generate_result_maps() function wraps RasProcess.store_maps(), which deploys
HEC-RAS's native RasStoreMapHelper.exe to render simulation results to GeoTIFF rasters.
This is the same engine HEC-RAS uses internally — output matches native HEC-RAS exactly.
Related Notebooks¶
- 960_cloud_native_geometry_export.ipynb — Export geometry to GeoParquet (no HEC-RAS required)
- 961_cloud_native_results_export.ipynb — Export vector results to GeoParquet with DuckDB
- 601_floodplain_mapping_rasprocess.ipynb — RasProcess.store_maps() directly (lower-level API)
Parameters¶
PROJECT_NAME = "BaldEagleCrkMulti2D"
RAS_VERSION = "6.6"
OUTPUT_DIR = Path("out/962_cloud_native_cog").resolve()
OUTPUT_DIR.mkdir(parents=True, exist_ok=True)
Available Map Types¶
ras2cng supports 11 result raster types via the generate_result_maps() function:
| Map Type | Parameter | Default | Description |
|---|---|---|---|
| Water Surface Elevation | wse |
On | Absolute water surface elevation |
| Depth | depth |
On | Water depth above ground |
| Velocity | velocity |
On | Flow velocity magnitude |
| Froude Number | froude |
Off | Subcritical/supercritical classification |
| Shear Stress | shear_stress |
Off | Bed shear stress |
| Depth x Velocity | depth_x_velocity |
Off | Hazard index (DxV) |
| Depth x Velocity² | depth_x_velocity_sq |
Off | Force proxy (DxV²) |
| Inundation Boundary | inundation_boundary |
Off | Flood extent polygon (shapefile) |
| Arrival Time | arrival_time |
Off | Time water first arrives |
| Duration | duration |
Off | Time area stays wet |
| Recession | recession |
Off | Time water recedes |
WSE, Depth, and Velocity are enabled by default. Toggle others on/off as needed.
Example 1: Core Result Rasters (WSE, Depth, Velocity)¶
Extract a project, run a simulation, then generate the three default result rasters as Cloud Optimized GeoTIFFs.
Extract and Initialize Project¶
project_path = RasExamples.extract_project(PROJECT_NAME)
ras_obj = init_ras_project(project_path, RAS_VERSION)
print(f"Project: {project_path}")
print(f"Plans: {len(ras.plan_df)}")
print(f"Geometries: {len(ras.geom_df)}")
ras.plan_df[['plan_number', 'Plan Title', 'Geom File']].head()
2026-06-11 14:52:34 - ras_commander.RasExamples - INFO - Successfully extracted project 'BaldEagleCrkMulti2D' to <repo>\examples\example_projects\BaldEagleCrkMulti2D
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 7.0 at <hec-ras-install>\7.0\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.7 Beta 5 at <hec-ras-install>\6.7 Beta 5\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.7 Beta 4 at <hec-ras-install>\6.7 Beta 4\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.6 at <hec-ras-install>\6.6\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.5 at <hec-ras-install>\6.5\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.4.1 at <hec-ras-install>\6.4.1\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.3.1 at <hec-ras-install>\6.3.1\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.3 at <hec-ras-install>\6.3\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.2 at <hec-ras-install>\6.2\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.1 at <hec-ras-install>\6.1\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.0 at <hec-ras-install>\6.0\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.7 at <hec-ras-install>\5.0.7\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.6 at <hec-ras-install>\5.0.6\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.5 at <hec-ras-install>\5.0.5\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.4 at <hec-ras-install>\5.0.4\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.3 at <hec-ras-install>\5.0.3\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.1 at <hec-ras-install>\5.0.1\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0 at <hec-ras-install>\5.0\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 4.1.0 at <hec-ras-install>\4.1.0\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 4.0 at <hec-ras-install>\4.0\Ras.exe via filesystem (x86)
2026-06-11 14:52:34 - ras_commander.RasUtils - INFO - Discovered 20 installed HEC-RAS version(s)
2026-06-11 14:52:34 - ras_commander.RasPrj - INFO - HEC-RAS 6.6 found via version discovery: <hec-ras-install>\6.6\Ras.exe
2026-06-11 14:52:34 - ras_commander.RasMap - INFO - Successfully parsed RASMapper file: <repo>\examples\example_projects\BaldEagleCrkMulti2D\BaldEagleDamBrk.rasmap
2026-06-11 14:52:34 - ras_commander.RasPrj - INFO - ras-commander v0.98.0 | An open-source project of CLB Engineering Corporation (https://clbengineering.com/) | Docs: https://rascommander.info | GitHub: https://github.com/gpt-cmdr/ras-commander
2026-06-11 14:52:34 - ras_commander.RasPrj - INFO - Project initialized: BaldEagleDamBrk | Folder: <repo>\examples\example_projects\BaldEagleCrkMulti2D
2026-06-11 14:52:34 - ras_commander.RasPrj - INFO - Using HEC-RAS executable: <hec-ras-install>\6.6\Ras.exe
2026-06-11 14:52:34 - ras_commander.RasPrj - INFO -
═══════════════════════════════════════════════════════════════════════
ras-commander | HEC-RAS Automation Library
Docs: https://rascommander.info/
Repo: https://github.com/gpt-cmdr/ras-commander
═══════════════════════════════════════════════════════════════════════
PROJECT DATAFRAMES (single source of truth — use these, not file globbing):
ras.plan_df Plans, HDF paths, geometry/flow associations
ras.geom_df Geometry files and HDF preprocessor paths
ras.flow_df Steady flow files
ras.unsteady_df Unsteady flow files and configurations
ras.boundaries_df Boundary conditions (type, name, location)
ras.results_df Lightweight HDF results summaries
ras.rasmap_df RASMapper layers, terrain, land cover paths
KEY APIS (static classes — call directly, never instantiate):
Execution: RasCmdr.compute_plan() / compute_parallel() / compute_test_mode()
Plan Files: RasPlan.clone_plan() / clone_geom() / set_geom()
Unsteady: RasUnsteady — IC/BC management, gate openings, precipitation
Geometry: GeomCrossSection, GeomBridge, GeomStorage, GeomLateral, GeomMesh
HDF Results: HdfResultsPlan.get_wse() / get_compute_messages()
HdfResultsMesh.get_mesh_max_ws() / get_mesh_cells_timeseries()
HdfMesh.get_mesh_cell_points()
QA/QC: RasCheck.run_check() / RasFixit (geometry repair)
DSS: RasDss.get_timeseries() / check_pathname()
USGS: UsgsGaugeSpatial, GaugeMatcher, RasUsgsBoundaryGeneration
Precipitation: StormGenerator, Atlas14Storm, PrecipAorc, Atlas14Variance
Terrain: RasTerrain.create_terrain_hdf() / RasTerrainMod
MULTI-PROJECT: Pass ras_object= to all API calls when using local RasPrj instances.
EXAMPLES: 100+ notebooks in examples/ (100s=execution, 200s=geometry, 300s=unsteady,
400s=HDF results, 500s=remote, 800s=QA/QC, 900s=data integration).
Review relevant notebooks before assembling new workflows.
PLATFORM: Most HEC-RAS operations require Windows. Linux/Wine support for
headless execution, data access, geometry modification, and preprocessing
is available via RasProcess (HEC-RAS 6.6+). See ras_commander/RasProcess.py.
Remote distributed execution: ras_commander/remote/ (PsExec, Docker, SSH, cloud).
═══════════════════════════════════════════════════════════════════════
Project: <repo>\examples\example_projects\BaldEagleCrkMulti2D
Plans: 11
Geometries: 10
| plan_number | Plan Title | Geom File | |
|---|---|---|---|
| 0 | 13 | PMF with Multi 2D Areas | 06 |
| 1 | 15 | 1d-2D Dambreak Refined Grid | 08 |
| 2 | 17 | 2D to 1D No Dam | 10 |
| 3 | 18 | 2D to 2D Run | 11 |
| 4 | 19 | SA to 2D Dam Break Run | 12 |
Run Simulation¶
Execute the first plan to generate results HDF files. Smart skip avoids re-running if results are current.
plan_number = ras.plan_df['plan_number'].iloc[0]
print(f"Running plan {plan_number}...")
try:
RasCmdr.compute_plan(plan_number)
print(f"Plan {plan_number} completed.")
except Exception as e:
print(f"Execution failed: {e}")
print("Continuing with any existing HDF files...")
2026-06-11 14:52:34 - ras_commander.RasCmdr - INFO - Using ras_object with project folder: <repo>\examples\example_projects\BaldEagleCrkMulti2D
2026-06-11 14:52:34 - ras_commander.RasCmdr - INFO - Running HEC-RAS from the Command Line:
2026-06-11 14:52:34 - ras_commander.RasCmdr - INFO - Running command: "<hec-ras-install>\6.6\Ras.exe" -c "<repo>\examples\example_projects\BaldEagleCrkMulti2D\BaldEagleDamBrk.prj" "<repo>\examples\example_projects\BaldEagleCrkMulti2D\BaldEagleDamBrk.p13"
2026-06-11 14:52:34 - ras_commander.RasDialogWatchdog - INFO - DialogWatchdog started — polling every 1.5s for RAS dialog windows
Running plan 13...
2026-06-11 14:55:37 - ras_commander.RasCmdr - INFO - HEC-RAS execution completed for plan: 13
2026-06-11 14:55:37 - ras_commander.RasCmdr - INFO - Total run time for plan 13: 182.40 seconds
2026-06-11 14:55:37 - ras_commander.RasDialogWatchdog - INFO - DialogWatchdog stopped — no dialogs encountered
Plan 13 completed.
plan_hdfs = sorted(project_path.glob("*.p??.hdf"))
print(f"Plan HDF files: {[f.name for f in plan_hdfs]}")
if not plan_hdfs:
print("\nNo plan HDF files found. HEC-RAS must run successfully to generate result rasters.")
else:
for hdf in plan_hdfs:
print(f" {hdf.name}: {hdf.stat().st_size / 1e6:.1f} MB")
Plan HDF files: ['BaldEagleDamBrk.p13.hdf']
BaldEagleDamBrk.p13.hdf: 17.8 MB
Generate Result Rasters¶
Use generate_result_maps() to produce WSE, Depth, and Velocity rasters with COG conversion enabled.
Under the hood this calls RasProcess.store_maps() with RasStoreMapHelper.exe.
from ras2cng import generate_result_maps, MapResult
core_output = OUTPUT_DIR / "core_maps"
if plan_hdfs:
results = generate_result_maps(
project_path,
core_output,
plans=[f"p{plan_number}"],
profile="Max",
wse=True,
depth=True,
velocity=True,
ras_version=RAS_VERSION,
convert_cog=True,
)
print(f"\nGenerated {len(results)} plan result(s):")
for r in results:
print(f" Plan {r.plan_id}:")
for map_type, paths in r.map_types.items():
for p in paths:
print(f" {map_type}: {p.name} ({p.stat().st_size / 1e6:.1f} MB)")
if r.errors:
print(f" Errors: {r.errors}")
else:
print("No HDF files available — skipping raster generation.")
results = []
ras2cng map -> <repo>\examples\out\962_cloud_native_cog\core_maps
Project : BaldEagleDamBrk.prj
Profile : Max
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 7.0 at <hec-ras-install>\7.0\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.7 Beta 5 at <hec-ras-install>\6.7 Beta 5\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.7 Beta 4 at <hec-ras-install>\6.7 Beta 4\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.6 at <hec-ras-install>\6.6\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.5 at <hec-ras-install>\6.5\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.4.1 at <hec-ras-install>\6.4.1\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.3.1 at <hec-ras-install>\6.3.1\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.3 at <hec-ras-install>\6.3\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.2 at <hec-ras-install>\6.2\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.1 at <hec-ras-install>\6.1\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.0 at <hec-ras-install>\6.0\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.7 at <hec-ras-install>\5.0.7\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.6 at <hec-ras-install>\5.0.6\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.5 at <hec-ras-install>\5.0.5\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.4 at <hec-ras-install>\5.0.4\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.3 at <hec-ras-install>\5.0.3\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.1 at <hec-ras-install>\5.0.1\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0 at <hec-ras-install>\5.0\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 4.1.0 at <hec-ras-install>\4.1.0\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 4.0 at <hec-ras-install>\4.0\Ras.exe via filesystem (x86)
2026-06-11 14:55:37 - ras_commander.RasUtils - INFO - Discovered 20 installed HEC-RAS version(s)
2026-06-11 14:55:37 - ras_commander.RasPrj - INFO - HEC-RAS 6.6 found via version discovery: <hec-ras-install>\6.6\Ras.exe
2026-06-11 14:55:37 - ras_commander.RasMap - INFO - Successfully parsed RASMapper file: <repo>\examples\example_projects\BaldEagleCrkMulti2D\BaldEagleDamBrk.rasmap
2026-06-11 14:55:37 - ras_commander.RasPrj - INFO - ras-commander v0.98.0 | An open-source project of CLB Engineering Corporation (https://clbengineering.com/) | Docs: https://rascommander.info | GitHub: https://github.com/gpt-cmdr/ras-commander
2026-06-11 14:55:37 - ras_commander.RasPrj - INFO - Project initialized: BaldEagleDamBrk | Folder: <repo>\examples\example_projects\BaldEagleCrkMulti2D
2026-06-11 14:55:37 - ras_commander.RasPrj - INFO - Using HEC-RAS executable: <hec-ras-install>\6.6\Ras.exe
2026-06-11 14:55:37 - ras_commander.RasPrj - INFO -
═══════════════════════════════════════════════════════════════════════
ras-commander | HEC-RAS Automation Library
Docs: https://rascommander.info/
Repo: https://github.com/gpt-cmdr/ras-commander
═══════════════════════════════════════════════════════════════════════
PROJECT DATAFRAMES (single source of truth — use these, not file globbing):
ras_object.plan_df Plans, HDF paths, geometry/flow associations
ras_object.geom_df Geometry files and HDF preprocessor paths
ras_object.flow_df Steady flow files
ras_object.unsteady_df Unsteady flow files and configurations
ras_object.boundaries_df Boundary conditions (type, name, location)
ras_object.results_df Lightweight HDF results summaries
ras_object.rasmap_df RASMapper layers, terrain, land cover paths
KEY APIS (static classes — call directly, never instantiate):
Execution: RasCmdr.compute_plan() / compute_parallel() / compute_test_mode()
Plan Files: RasPlan.clone_plan() / clone_geom() / set_geom()
Unsteady: RasUnsteady — IC/BC management, gate openings, precipitation
Geometry: GeomCrossSection, GeomBridge, GeomStorage, GeomLateral, GeomMesh
HDF Results: HdfResultsPlan.get_wse() / get_compute_messages()
HdfResultsMesh.get_mesh_max_ws() / get_mesh_cells_timeseries()
HdfMesh.get_mesh_cell_points()
QA/QC: RasCheck.run_check() / RasFixit (geometry repair)
DSS: RasDss.get_timeseries() / check_pathname()
USGS: UsgsGaugeSpatial, GaugeMatcher, RasUsgsBoundaryGeneration
Precipitation: StormGenerator, Atlas14Storm, PrecipAorc, Atlas14Variance
Terrain: RasTerrain.create_terrain_hdf() / RasTerrainMod
MULTI-PROJECT: Pass ras_object= to all API calls when using local RasPrj instances.
EXAMPLES: 100+ notebooks in examples/ (100s=execution, 200s=geometry, 300s=unsteady,
400s=HDF results, 500s=remote, 800s=QA/QC, 900s=data integration).
Review relevant notebooks before assembling new workflows.
PLATFORM: Most HEC-RAS operations require Windows. Linux/Wine support for
headless execution, data access, geometry modification, and preprocessing
is available via RasProcess (HEC-RAS 6.6+). See ras_commander/RasProcess.py.
Remote distributed execution: ras_commander/remote/ (PsExec, Docker, SSH, cloud).
═══════════════════════════════════════════════════════════════════════
Map types: wse, depth, velocity
Generating maps...
2026-06-11 14:55:37 - ras_commander.RasProcess - INFO - Created plan layer 'PMF Multi 2D' in rasmap for BaldEagleDamBrk.p13.hdf
2026-06-11 14:55:37 - ras_commander.RasProcess - INFO - Running StoreAllMaps for plan 13 (mode=sloping)...
2026-06-11 14:55:37 - ras_commander._native_helper - INFO - Staged RasStoreMapHelper.exe to <user-home>\AppData\Local\ras-commander\bin\RasStoreMapHelper-0.98.0-d1a79dadb9b4-e002354b4799\RasStoreMapHelper.exe
2026-06-11 14:55:37 - ras_commander._native_helper - INFO - Using staged RasStoreMapHelper runtime at <user-home>\AppData\Local\ras-commander\bin\RasStoreMapHelper-0.98.0-d1a79dadb9b4-e002354b4799\RasStoreMapHelper.exe because the packaged helper has no sibling GDAL directory.
2026-06-11 14:55:45 - ras_commander.RasProcess - INFO - Moving generated files from <repo>\examples\example_projects\BaldEagleCrkMulti2D\PMF Multi 2D to <repo>\examples\out\962_cloud_native_cog\core_maps\p13
2026-06-11 14:55:45 - ras_commander.RasProcess - INFO - Moved 6 generated file(s) to <repo>\examples\out\962_cloud_native_cog\core_maps\p13
2026-06-11 14:55:45 - ras_commander.RasProcess - INFO - Generated 1 wse TIF(s)
2026-06-11 14:55:45 - ras_commander.RasProcess - INFO - Generated 1 depth TIF(s)
2026-06-11 14:55:45 - ras_commander.RasProcess - INFO - Generated 1 velocity TIF(s)
2026-06-11 14:55:46 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\core_maps\p13\WSE (Max).Terrain50.dtm_20ft.tif
2026-06-11 14:55:47 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\core_maps\p13\Depth (Max).Terrain50.dtm_20ft.tif
2026-06-11 14:55:48 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\core_maps\p13\Velocity (Max).Terrain50.dtm_20ft.tif
wse: 1 raster(s)
depth: 1 raster(s)
velocity: 1 raster(s)
OK Generated 3 raster(s) from 1 plan(s)
Generated 1 plan result(s):
Plan p13:
wse: WSE (Max).Terrain50.dtm_20ft.tif (2.1 MB)
depth: Depth (Max).Terrain50.dtm_20ft.tif (4.0 MB)
velocity: Velocity (Max).Terrain50.dtm_20ft.tif (4.6 MB)
Inspect Raster Metadata¶
Use rasterio to inspect the generated rasters — CRS, dimensions, bounds, and data type.
try:
import rasterio
has_rasterio = True
except ImportError:
has_rasterio = False
print("rasterio not installed. Install with: pip install rasterio")
if has_rasterio and results:
for r in results:
for map_type, paths in r.map_types.items():
for tif_path in paths:
with rasterio.open(tif_path) as src:
print(f"\n{map_type}: {tif_path.name}")
print(f" CRS: {src.crs}")
print(f" Dimensions: {src.width} x {src.height}")
print(f" Bounds: {src.bounds}")
print(f" Resolution: {src.res[0]:.2f} x {src.res[1]:.2f}")
print(f" Data type: {src.dtypes[0]}")
print(f" NoData: {src.nodata}")
data = src.read(1, masked=True)
valid = data.compressed()
if len(valid) > 0:
print(f" Value range: {valid.min():.2f} — {valid.max():.2f}")
print(f" Valid cells: {len(valid):,} / {data.size:,} ({100*len(valid)/data.size:.1f}%)")
wse: WSE (Max).Terrain50.dtm_20ft.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Bounds: BoundingBox(left=1834327.1955903, bottom=237753.0548772926, right=2079089.948885101, top=414872.9473435675)
Resolution: 36.50 x 36.50
Data type: float32
NoData: -9999.0
Value range: 559.70 — 686.16
Valid cells: 1,311,839 / 32,532,660 (4.0%)
depth: Depth (Max).Terrain50.dtm_20ft.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Bounds: BoundingBox(left=1834327.1955903, bottom=237753.0548772926, right=2079089.948885101, top=414872.9473435675)
Resolution: 36.50 x 36.50
Data type: float32
NoData: -9999.0
Value range: 0.00 — 92.15
Valid cells: 1,311,839 / 32,532,660 (4.0%)
velocity: Velocity (Max).Terrain50.dtm_20ft.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Bounds: BoundingBox(left=1834327.1955903, bottom=237753.0548772926, right=2079089.948885101, top=414872.9473435675)
Resolution: 36.50 x 36.50
Data type: float32
NoData: -9999.0
Value range: 0.00 — 27.89
Valid cells: 1,311,839 / 32,532,660 (4.0%)
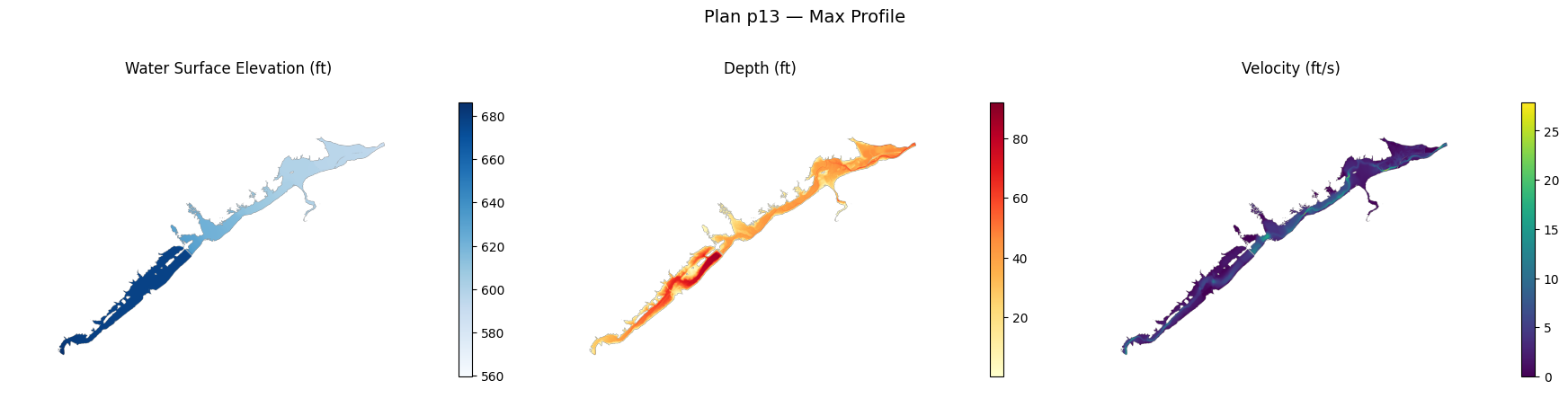
Display Raster Results¶
Plot each result raster with matplotlib. Depth uses a warm color ramp; WSE and Velocity use sequential blue and viridis palettes.
import matplotlib.pyplot as plt
from matplotlib.colors import Normalize
CMAP_CONFIG = {
"wse": {"cmap": "Blues", "label": "Water Surface Elevation (ft)"},
"depth": {"cmap": "YlOrRd", "label": "Depth (ft)"},
"velocity": {"cmap": "viridis", "label": "Velocity (ft/s)"},
}
if has_rasterio and results:
for r in results:
n_maps = len(r.map_types)
if n_maps == 0:
continue
fig, axes = plt.subplots(1, n_maps, figsize=(6 * n_maps, 5))
if n_maps == 1:
axes = [axes]
for ax, (map_type, paths) in zip(axes, r.map_types.items()):
tif_path = paths[0]
with rasterio.open(tif_path) as src:
data = src.read(1, masked=True)
cfg = CMAP_CONFIG.get(map_type, {"cmap": "viridis", "label": map_type})
im = ax.imshow(data, cmap=cfg["cmap"])
ax.set_title(cfg["label"])
ax.set_axis_off()
plt.colorbar(im, ax=ax, shrink=0.7, pad=0.02)
fig.suptitle(f"Plan {r.plan_id} — Max Profile", fontsize=14)
plt.tight_layout()
plt.show()
elif not results:
print("No results to display.")
else:
print("Install rasterio + matplotlib for raster visualization.")
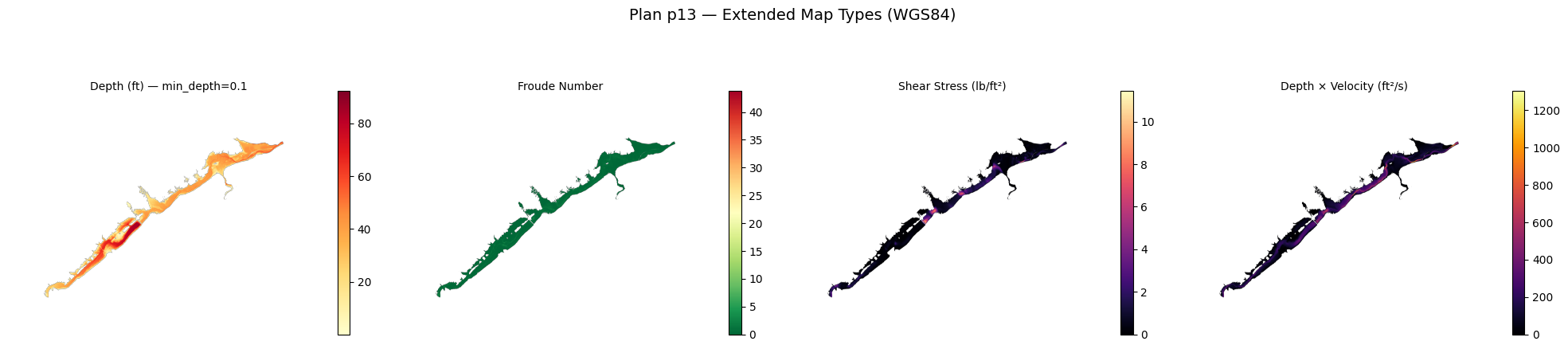
Example 2: Extended Map Types with WGS84 Reprojection¶
Generate additional map types (Froude, Shear Stress, Depth x Velocity) and reproject to WGS84 for web-compatible rasters.
extended_output = OUTPUT_DIR / "extended_maps"
if plan_hdfs:
extended_results = generate_result_maps(
project_path,
extended_output,
plans=[f"p{plan_number}"],
profile="Max",
wse=False,
depth=True,
velocity=False,
froude=True,
shear_stress=True,
depth_x_velocity=True,
min_depth=0.1,
ras_version=RAS_VERSION,
reproject_wgs84=True,
convert_cog=True,
)
print(f"\nGenerated {len(extended_results)} plan result(s):")
for r in extended_results:
print(f" Plan {r.plan_id}:")
for map_type, paths in r.map_types.items():
for p in paths:
size_mb = p.stat().st_size / 1e6 if p.exists() else 0
print(f" {map_type}: {p.name} ({size_mb:.1f} MB)")
if r.errors:
print(f" Errors: {r.errors}")
else:
print("No HDF files available — skipping extended raster generation.")
extended_results = []
ras2cng map -> <repo>\examples\out\962_cloud_native_cog\extended_maps
Project : BaldEagleDamBrk.prj
Profile : Max
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 7.0 at <hec-ras-install>\7.0\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.7 Beta 5 at <hec-ras-install>\6.7 Beta 5\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.7 Beta 4 at <hec-ras-install>\6.7 Beta 4\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.6 at <hec-ras-install>\6.6\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.5 at <hec-ras-install>\6.5\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.4.1 at <hec-ras-install>\6.4.1\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.3.1 at <hec-ras-install>\6.3.1\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.3 at <hec-ras-install>\6.3\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.2 at <hec-ras-install>\6.2\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.1 at <hec-ras-install>\6.1\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 6.0 at <hec-ras-install>\6.0\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.7 at <hec-ras-install>\5.0.7\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.6 at <hec-ras-install>\5.0.6\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.5 at <hec-ras-install>\5.0.5\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.4 at <hec-ras-install>\5.0.4\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.3 at <hec-ras-install>\5.0.3\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0.1 at <hec-ras-install>\5.0.1\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 5.0 at <hec-ras-install>\5.0\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 4.1.0 at <hec-ras-install>\4.1.0\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered HEC-RAS 4.0 at <hec-ras-install>\4.0\Ras.exe via filesystem (x86)
2026-06-11 14:56:05 - ras_commander.RasUtils - INFO - Discovered 20 installed HEC-RAS version(s)
2026-06-11 14:56:05 - ras_commander.RasPrj - INFO - HEC-RAS 6.6 found via version discovery: <hec-ras-install>\6.6\Ras.exe
2026-06-11 14:56:05 - ras_commander.RasMap - INFO - Successfully parsed RASMapper file: <repo>\examples\example_projects\BaldEagleCrkMulti2D\BaldEagleDamBrk.rasmap
2026-06-11 14:56:05 - ras_commander.RasPrj - INFO - ras-commander v0.98.0 | An open-source project of CLB Engineering Corporation (https://clbengineering.com/) | Docs: https://rascommander.info | GitHub: https://github.com/gpt-cmdr/ras-commander
2026-06-11 14:56:05 - ras_commander.RasPrj - INFO - Project initialized: BaldEagleDamBrk | Folder: <repo>\examples\example_projects\BaldEagleCrkMulti2D
2026-06-11 14:56:05 - ras_commander.RasPrj - INFO - Using HEC-RAS executable: <hec-ras-install>\6.6\Ras.exe
2026-06-11 14:56:05 - ras_commander.RasPrj - INFO -
═══════════════════════════════════════════════════════════════════════
ras-commander | HEC-RAS Automation Library
Docs: https://rascommander.info/
Repo: https://github.com/gpt-cmdr/ras-commander
═══════════════════════════════════════════════════════════════════════
PROJECT DATAFRAMES (single source of truth — use these, not file globbing):
ras_object.plan_df Plans, HDF paths, geometry/flow associations
ras_object.geom_df Geometry files and HDF preprocessor paths
ras_object.flow_df Steady flow files
ras_object.unsteady_df Unsteady flow files and configurations
ras_object.boundaries_df Boundary conditions (type, name, location)
ras_object.results_df Lightweight HDF results summaries
ras_object.rasmap_df RASMapper layers, terrain, land cover paths
KEY APIS (static classes — call directly, never instantiate):
Execution: RasCmdr.compute_plan() / compute_parallel() / compute_test_mode()
Plan Files: RasPlan.clone_plan() / clone_geom() / set_geom()
Unsteady: RasUnsteady — IC/BC management, gate openings, precipitation
Geometry: GeomCrossSection, GeomBridge, GeomStorage, GeomLateral, GeomMesh
HDF Results: HdfResultsPlan.get_wse() / get_compute_messages()
HdfResultsMesh.get_mesh_max_ws() / get_mesh_cells_timeseries()
HdfMesh.get_mesh_cell_points()
QA/QC: RasCheck.run_check() / RasFixit (geometry repair)
DSS: RasDss.get_timeseries() / check_pathname()
USGS: UsgsGaugeSpatial, GaugeMatcher, RasUsgsBoundaryGeneration
Precipitation: StormGenerator, Atlas14Storm, PrecipAorc, Atlas14Variance
Terrain: RasTerrain.create_terrain_hdf() / RasTerrainMod
MULTI-PROJECT: Pass ras_object= to all API calls when using local RasPrj instances.
EXAMPLES: 100+ notebooks in examples/ (100s=execution, 200s=geometry, 300s=unsteady,
400s=HDF results, 500s=remote, 800s=QA/QC, 900s=data integration).
Review relevant notebooks before assembling new workflows.
PLATFORM: Most HEC-RAS operations require Windows. Linux/Wine support for
headless execution, data access, geometry modification, and preprocessing
is available via RasProcess (HEC-RAS 6.6+). See ras_commander/RasProcess.py.
Remote distributed execution: ras_commander/remote/ (PsExec, Docker, SSH, cloud).
═══════════════════════════════════════════════════════════════════════
Map types: depth, froude, shear_stress, depth_x_velocity
Generating maps...
2026-06-11 14:56:05 - ras_commander.RasProcess - INFO - Created plan layer 'PMF Multi 2D' in rasmap for BaldEagleDamBrk.p13.hdf
2026-06-11 14:56:05 - ras_commander.RasProcess - INFO - Running StoreAllMaps for plan 13 (mode=sloping)...
2026-06-11 14:56:05 - ras_commander._native_helper - INFO - Using staged RasStoreMapHelper runtime at <user-home>\AppData\Local\ras-commander\bin\RasStoreMapHelper-0.98.0-d1a79dadb9b4-e002354b4799\RasStoreMapHelper.exe because the packaged helper has no sibling GDAL directory.
2026-06-11 14:56:52 - ras_commander.RasProcess - INFO - Moving generated files from <repo>\examples\example_projects\BaldEagleCrkMulti2D\PMF Multi 2D to <repo>\examples\out\962_cloud_native_cog\extended_maps\p13
2026-06-11 14:56:52 - ras_commander.RasProcess - INFO - Moved 9 generated file(s) to <repo>\examples\out\962_cloud_native_cog\extended_maps\p13
2026-06-11 14:56:52 - ras_commander.RasProcess - INFO - Generated 4 depth TIF(s)
2026-06-11 14:56:52 - ras_commander.RasProcess - INFO - Generated 1 froude TIF(s)
2026-06-11 14:56:52 - ras_commander.RasProcess - INFO - Generated 1 shear_stress TIF(s)
2026-06-11 14:56:52 - ras_commander.RasProcess - INFO - Generated 1 depth_x_velocity TIF(s)
2026-06-11 14:56:53 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\extended_maps\p13\Depth (Max).Terrain50.dtm_20ft.tif
2026-06-11 14:56:54 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\extended_maps\p13\Depth (Max).Terrain50.dtm_20ft_filtered.tif
2026-06-11 14:56:55 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\extended_maps\p13\Depth (Max).Terrain50.dtm_20ft_filtered_filtered.tif
2026-06-11 14:56:56 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\extended_maps\p13\Depth (Max).Terrain50.dtm_20ft_filtered_filtered_filtered.tif
2026-06-11 14:56:57 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\extended_maps\p13\Froude (Max).Terrain50.dtm_20ft.tif
2026-06-11 14:56:58 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\extended_maps\p13\Shear Stress (Max).Terrain50.dtm_20ft.tif
2026-06-11 14:56:59 - ras_commander.RasProcess - INFO - Fixed georeferencing: <repo>\examples\out\962_cloud_native_cog\extended_maps\p13\D _ V (Max).Terrain50.dtm_20ft.tif
Warning: rasterio not available for reprojection
depth: 4 raster(s)
Warning: rasterio not available for reprojection
froude: 1 raster(s)
Warning: rasterio not available for reprojection
shear_stress: 1 raster(s)
Warning: rasterio not available for reprojection
depth_x_velocity: 1 raster(s)
OK Generated 7 raster(s) from 1 plan(s)
Generated 1 plan result(s):
Plan p13:
depth: Depth (Max).Terrain50.dtm_20ft_filtered.tif (4.0 MB)
depth: Depth (Max).Terrain50.dtm_20ft_filtered_filtered.tif (4.0 MB)
depth: Depth (Max).Terrain50.dtm_20ft_filtered_filtered_filtered.tif (4.0 MB)
depth: Depth (Max).Terrain50.dtm_20ft_filtered_filtered_filtered_filtered.tif (4.0 MB)
froude: Froude (Max).Terrain50.dtm_20ft.tif (4.7 MB)
shear_stress: Shear Stress (Max).Terrain50.dtm_20ft.tif (4.6 MB)
depth_x_velocity: D _ V (Max).Terrain50.dtm_20ft.tif (4.7 MB)
Inspect Extended Rasters¶
Verify the extended rasters have WGS84 CRS and the depth threshold was applied.
if has_rasterio and extended_results:
for r in extended_results:
for map_type, paths in r.map_types.items():
for tif_path in paths:
if not tif_path.exists():
continue
with rasterio.open(tif_path) as src:
print(f"\n{map_type}: {tif_path.name}")
print(f" CRS: {src.crs}")
print(f" Dimensions: {src.width} x {src.height}")
data = src.read(1, masked=True)
valid = data.compressed()
if len(valid) > 0:
print(f" Value range: {valid.min():.3f} — {valid.max():.3f}")
print(f" Valid cells: {len(valid):,}")
if map_type == "depth":
below_threshold = (valid < 0.1).sum()
print(f" Cells below min_depth (0.1): {below_threshold}")
depth: Depth (Max).Terrain50.dtm_20ft_filtered.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Value range: 0.100 — 92.154
Valid cells: 1,310,186
Cells below min_depth (0.1): 0
depth: Depth (Max).Terrain50.dtm_20ft_filtered_filtered.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Value range: 0.100 — 92.154
Valid cells: 1,310,186
Cells below min_depth (0.1): 0
depth: Depth (Max).Terrain50.dtm_20ft_filtered_filtered_filtered.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Value range: 0.100 — 92.154
Valid cells: 1,310,186
Cells below min_depth (0.1): 0
depth: Depth (Max).Terrain50.dtm_20ft_filtered_filtered_filtered_filtered.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Value range: 0.100 — 92.154
Valid cells: 1,310,186
Cells below min_depth (0.1): 0
froude: Froude (Max).Terrain50.dtm_20ft.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Value range: 0.000 — 43.773
Valid cells: 1,310,437
shear_stress: Shear Stress (Max).Terrain50.dtm_20ft.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Value range: 0.000 — 11.444
Valid cells: 1,275,899
depth_x_velocity: D _ V (Max).Terrain50.dtm_20ft.tif
CRS: EPSG:2271
Dimensions: 6705 x 4852
Value range: 0.000 — 1303.324
Valid cells: 1,310,437
Display Extended Results¶
EXTENDED_CMAP = {
"depth": {"cmap": "YlOrRd", "label": "Depth (ft) — min_depth=0.1"},
"froude": {"cmap": "RdYlGn_r", "label": "Froude Number"},
"shear_stress": {"cmap": "magma", "label": "Shear Stress (lb/ft²)"},
"depth_x_velocity": {"cmap": "inferno", "label": "Depth × Velocity (ft²/s)"},
}
if has_rasterio and extended_results:
for r in extended_results:
n_maps = len(r.map_types)
if n_maps == 0:
continue
fig, axes = plt.subplots(1, n_maps, figsize=(5 * n_maps, 5))
if n_maps == 1:
axes = [axes]
for ax, (map_type, paths) in zip(axes, r.map_types.items()):
tif_path = paths[0]
if not tif_path.exists():
ax.text(0.5, 0.5, f"{map_type}\nnot generated", ha="center", va="center")
continue
with rasterio.open(tif_path) as src:
data = src.read(1, masked=True)
cfg = EXTENDED_CMAP.get(map_type, {"cmap": "viridis", "label": map_type})
im = ax.imshow(data, cmap=cfg["cmap"])
ax.set_title(cfg["label"], fontsize=10)
ax.set_axis_off()
plt.colorbar(im, ax=ax, shrink=0.7, pad=0.02)
fig.suptitle(f"Plan {r.plan_id} — Extended Map Types (WGS84)", fontsize=14)
plt.tight_layout()
plt.show()
elif not extended_results:
print("No extended results to display.")
Understanding Cloud Optimized GeoTIFF (COG)¶
Cloud Optimized GeoTIFF is a regular GeoTIFF with internal tiling and overview pyramids that enable efficient HTTP range requests. This means a web client can fetch just the tiles it needs without downloading the entire file.
When convert_cog=True:
1. generate_result_maps() first creates standard GeoTIFFs via RasStoreMapHelper.exe
2. Then converts each to COG using gdal_translate -of COG
3. Output files get a _cog suffix (e.g., Depth_Max_cog.tif)
Requirements: GDAL must be installed and gdal_translate on PATH.
Benefits of COG: - Stream rasters from S3/Azure/GCS without full download - Built-in overviews for fast zoom-out rendering - Compatible with QGIS, ArcGIS, leafmap, TiTiler, and other tools - No special server needed — works from any HTTP host
Output Summary¶
total_size = 0
file_count = 0
print("Output files:")
for f in sorted(OUTPUT_DIR.rglob("*")):
if f.is_file():
size_kb = f.stat().st_size / 1e3
total_size += size_kb
file_count += 1
rel = f.relative_to(OUTPUT_DIR)
print(f" {str(rel):50s} {size_kb:>8.1f} KB")
print(f"\nTotal: {file_count} files, {total_size / 1e3:.1f} MB")
Output files:
core_maps\p13\Depth (Max).Terrain50.dtm_20ft.tif 4029.5 KB
core_maps\p13\Depth (Max).vrt 3.4 KB
core_maps\p13\Velocity (Max).Terrain50.dtm_20ft.tif 4576.9 KB
core_maps\p13\Velocity (Max).vrt 3.2 KB
core_maps\p13\WSE (Max).Terrain50.dtm_20ft.tif 2079.4 KB
core_maps\p13\WSE (Max).vrt 3.1 KB
extended_maps\p13\D _ V (Max).Terrain50.dtm_20ft.tif 4654.5 KB
extended_maps\p13\D _ V (Max).vrt 3.1 KB
extended_maps\p13\Depth (Max).Terrain50.dtm_20ft.tif 4029.5 KB
extended_maps\p13\Depth (Max).Terrain50.dtm_20ft_filtered.tif 4017.4 KB
extended_maps\p13\Depth (Max).Terrain50.dtm_20ft_filtered_filtered.tif 4017.4 KB
extended_maps\p13\Depth (Max).Terrain50.dtm_20ft_filtered_filtered_filtered.tif 4017.4 KB
extended_maps\p13\Depth (Max).Terrain50.dtm_20ft_filtered_filtered_filtered_filtered.tif 4017.4 KB
extended_maps\p13\Depth (Max).vrt 3.4 KB
extended_maps\p13\Froude (Max).Terrain50.dtm_20ft.tif 4660.2 KB
extended_maps\p13\Froude (Max).vrt 2.8 KB
extended_maps\p13\PostProcessing.hdf 5753.6 KB
extended_maps\p13\Shear Stress (Max).Terrain50.dtm_20ft.tif 4621.5 KB
extended_maps\p13\Shear Stress (Max).vrt 3.1 KB
Total: 19 files, 50.5 MB
Key Takeaways¶
generate_result_maps()wraps RasStoreMapHelper.exe — output matches native HEC-RAS raster generation exactly- 11 map types available — WSE, Depth, Velocity enabled by default; toggle Froude, Shear, DxV, and timing variables as needed
- COG conversion via
convert_cog=True— produces web-streamable rasters with tiling and overviews - WGS84 reprojection via
reproject_wgs84=True— makes rasters compatible with web mapping tools - Depth threshold via
min_depth=0.1— filters shallow cells to NoData for cleaner flood maps - MapResult dataclass provides structured output with
plan_id,map_typesdict, anderrorslist
Python API Quick Reference¶
from ras2cng import generate_result_maps
# Core rasters with COG conversion
results = generate_result_maps(
project_path, output_dir,
wse=True, depth=True, velocity=True,
convert_cog=True,
)
# Extended types with WGS84 + depth filter
results = generate_result_maps(
project_path, output_dir,
froude=True, shear_stress=True, depth_x_velocity=True,
min_depth=0.1, reproject_wgs84=True, convert_cog=True,
)
# Access results
for r in results:
print(r.plan_id, r.map_types.keys(), r.errors)
CLI Quick Reference¶
# Default: WSE + Depth + Velocity
ras2cng map path/to/project/ ./maps/
# All core types with COG conversion
ras2cng map path/to/project/ ./maps/ --cog
# Extended types with depth filter and WGS84
ras2cng map path/to/project/ ./maps/ \
--froude --shear-stress --dv \
--min-depth 0.1 --wgs84 --cog
# Specific plan only
ras2cng map path/to/project/ ./maps/ --plans p01 --cog
Next Steps¶
- 960_cloud_native_geometry_export.ipynb — Export geometry to GeoParquet (no HEC-RAS required)
- 961_cloud_native_results_export.ipynb — Vector results export with DuckDB analytics
- 601_floodplain_mapping_rasprocess.ipynb — Lower-level RasProcess.store_maps() API
- ras2cng documentation — Complete API and CLI reference